

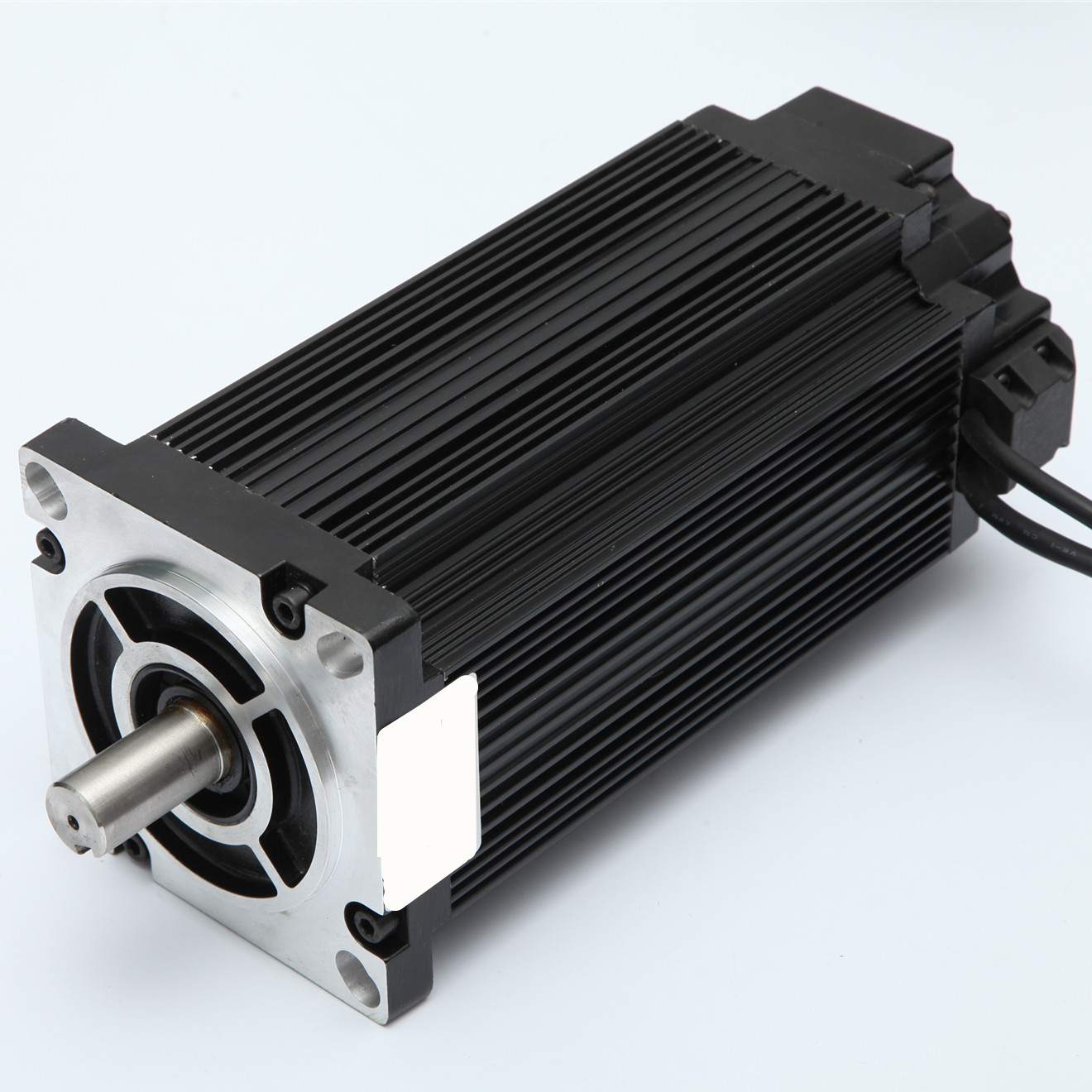
एलईडी डिस्प्ले के साथ 110 मिमी बंद लूप मोटर 220V 20Nm बड़ा टॉर्क स्टेपर मोटर
NEMA42 आसान सर्वो श्रृंखला(NEMA42 बंद लूप श्रृंखला)
मोटर इलेक्ट्रिकल पैरामीटर्स:
| तरीका | चरण कोण | वर्तमान (ए) | प्रतिरोध (Ω±10%) | अधिष्ठापन (एमएच±20%) | होल्डिंग टॉर्क (एनएम) | मोटर की लंबाई (मिमी) | एनकोडर संकल्प(पीपीआर) | लागू ड्राइवर |
| 110एचसीई12एन-बी39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
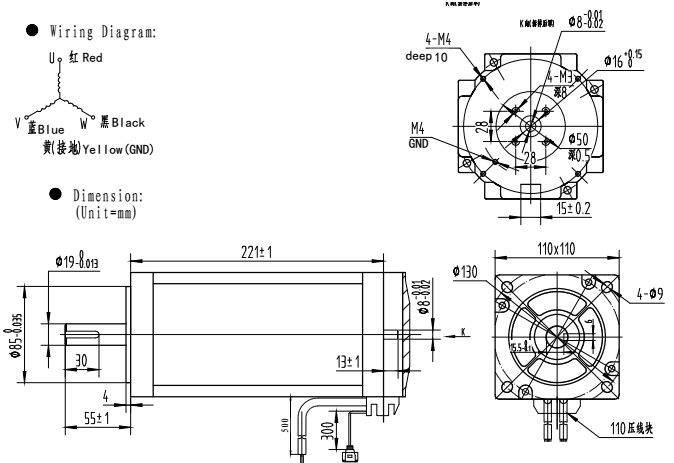
मोटर आयाम:मिमी
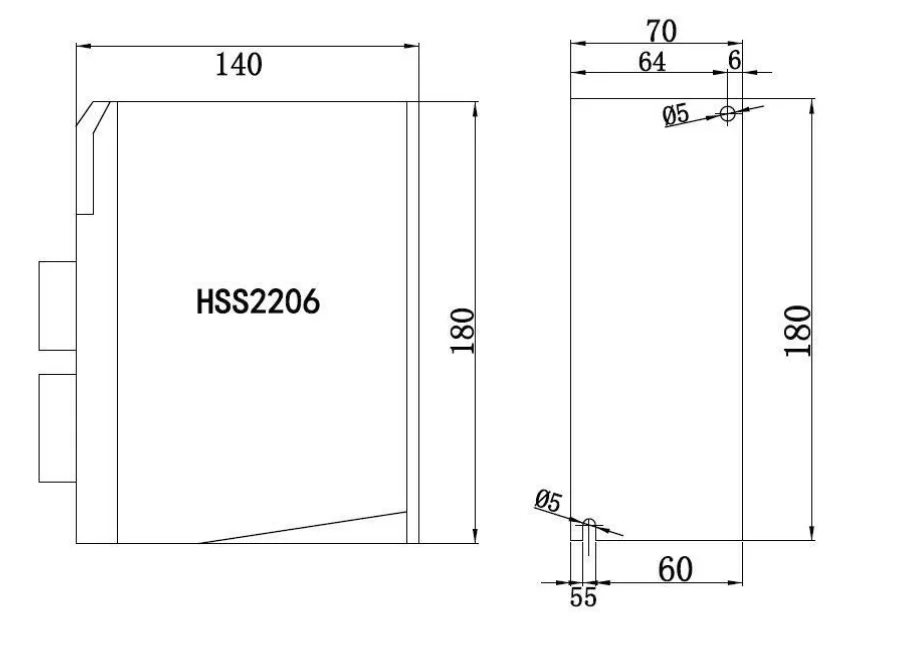
ड्राइवर 3HSS2260
विशेषताएँ
1, 32-बिट डीएसपी और वेक्टर क्लोज्ड-लूप नियंत्रण तकनीक
2, कदम खोए बिना, स्थिति में उच्च सटीकता
3, मोटर आउटपुट टॉर्क और काम करने की गति में सुधार करें
4, परिवर्तनीय वर्तमान नियंत्रण प्रौद्योगिकी, मोटर तापमान वृद्धि को रोकें
5, विभिन्न प्रकार की यांत्रिक भार स्थितियों (कम कठोरता वाले पुली सहित) के अनुकूल, नहीं
लाभ पैरामीटर को समायोजित करने की आवश्यकता है
6, सुचारू और विश्वसनीय गति, कम कंपन, गति में बहुत सुधार और
धीमा
7, कंपन के बिना शून्य गति स्थैतिक की क्षमता
8, 3-चरण 86(एनईएमए34) और 110(एनईएमए 42) हाइब्रिड सर्वो मोटर के अनुकूल
9, अधिकतम चरण-पल्स आवृत्ति 200KHZ
10, माइक्रो स्टेप 400-60000 पल्स/रेव
11, वोल्टेज रेंज AC150-240V
12, ओवर करंट, ओवर वोल्टेज और ओवर पोजीशन सुरक्षा
13, छह डिजिटल ट्यूब डिस्प्ले, पैरामीटर सेट करना और मोटर चलने की निगरानी करना आसान है
राज्य
माइक्रोस्टेप चयन:
| कोड | परिभाषा | श्रेणी | डिफ़ॉल्ट मान | टिप्पणी |
| पीए0 | संस्करण संख्या | 501 | संशोधन करना वर्जित है | |
| पीए1 | नियंत्रण मोड चयन | 0~2 | 0 | |
| पीए2 | मोटर प्रकार चयन | 0~2 | 0 | |
| पीए3 | डिस्प्ले को चालू करो | 0~7 | 0 | |
| पीए4 | वर्तमान लूप के.पी | 0~1000 | 200 | संशोधन करना वर्जित है |
| पीए5 | करंट लूप की | 0~1000 | 300 | संशोधन करना वर्जित है |
| पीए6 | स्थिति लूप के.पी | 0~1000 | 300 | |
| पीए7 | सूक्ष्म चरण सेटिंग | 400~60000 | 4000 | |
| PA8 | एनकोडर रिज़ॉल्यूशन(1000) | 4000 | संशोधन करना वर्जित है | |
| PA9 | एनकोडर रिज़ॉल्यूशन(1000) | 40~30000 | 1000 | |
| पीए10 | करंट धारण करना | 10~100 | 40 | |
| पीए11 | बंद लूप धारा | 10~100 | 100 | |
| पीए12 | आरक्षण | |||
| पीए13 | आरक्षण | |||
| पीए14 | स्तर सक्षम करें | 0/1 | 0 | |
| पीए15 | अलार्म स्तर | 0/1 | 0 | |
| पीए16 | पल्स मोड चयन | 0/1 | 0 | |
| पीए17 | पल्स एज | 0/1 | 0 | |
| पीए18 | मोटर घूर्णन दिशा | 0/1 | 0 | |
| पीए19 | जॉग स्पीड | 1~200 | 60 | |
| पीए20 | PEND मोड अनुभाग | 0/1 | 0 | |
| पीए21 | पेंड स्तर | 0/1 | 0 |
ड्राइवर आयाम (मिमी):
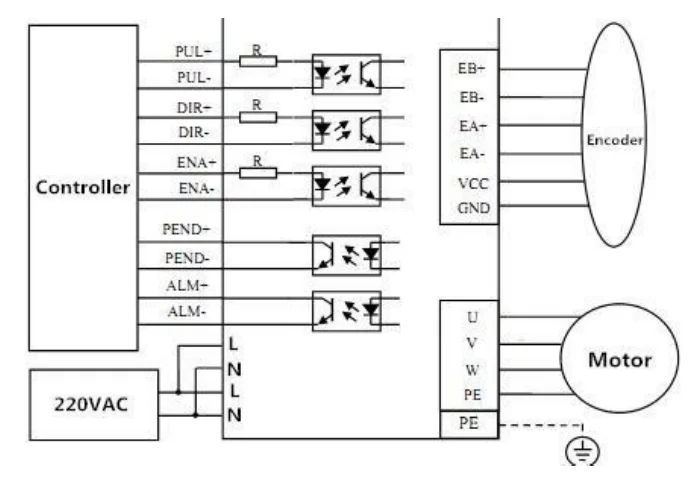
वायरिंग का नक्शा:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
